视觉SLAM——D435i运行VINS-MONO
本文共 1182 字,大约阅读时间需要 3 分钟。
转载自:
视觉SLAM——D435i运行VINS-MONO
2021-03-21 17:05:19 2
分类专栏: 文章标签:
一.安装测试librealsense SDK 2.0
注册公匙
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
添加repositories(Ubuntu 16 LTS)
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
安装library
sudo apt-get install librealsense2-dkmssudo apt-get install librealsense2-utils
安装developer和debug packages
sudo apt-get install librealsense2-devsudo apt-get install librealsense2-dbg
测试SDK
realsense-viewer
二.安装测试realsense
cd ~/catkin_ws/srcgit clone https://github.com/intel-ros/realsense.gitcd ..catkin_makerospack profilesource devel/setup.sh
三.安装测试VINS-Mono
cd ~/catkin_ws/srcgit clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.gitcd ..catkin_makesource ~/catkin_ws/devel/setup.bash
三.在D435i上运行VINS-Mono
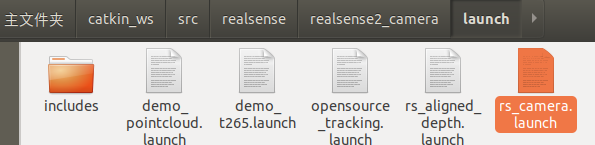
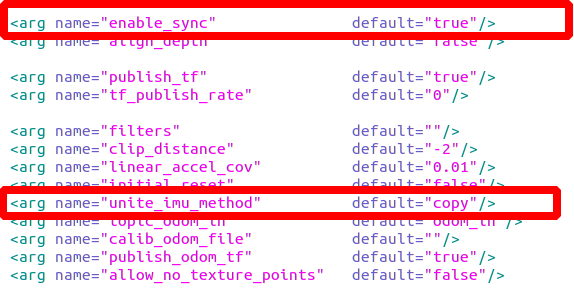
1.修改realsense包里的rs_camera.launch文件
 2.修改VINS-Mono包里的realsense_color_config.yaml文件
2.修改VINS-Mono包里的realsense_color_config.yaml文件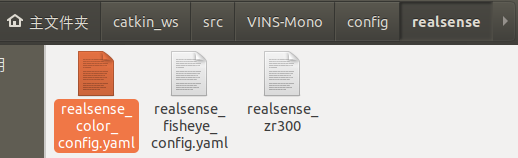
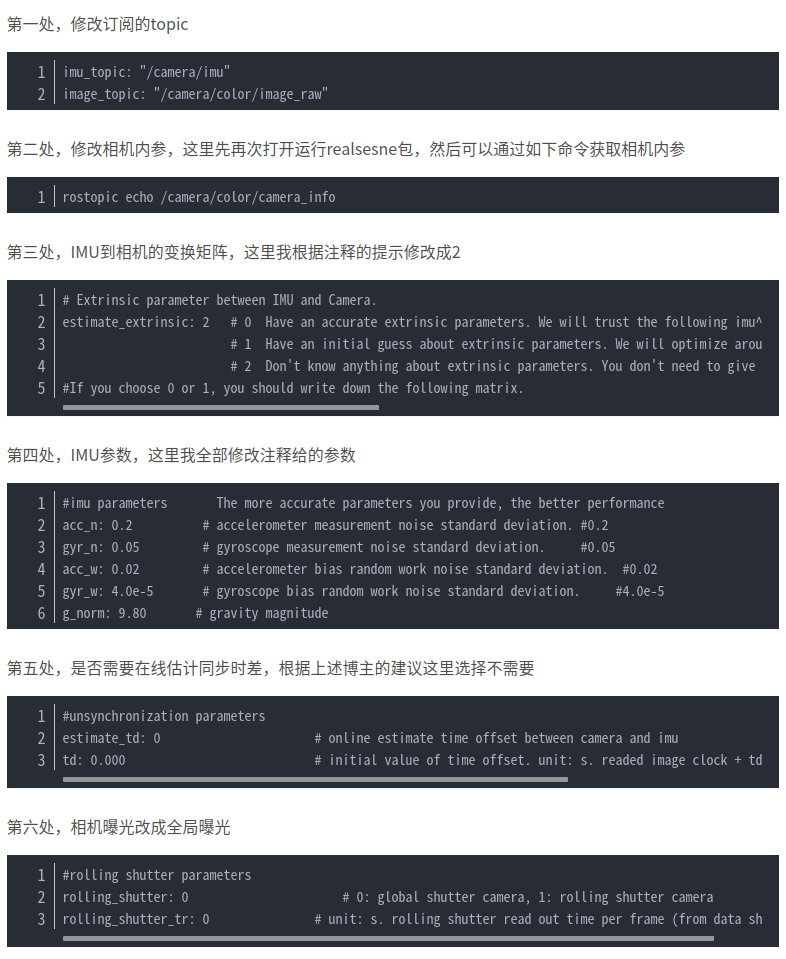 第二处我自己的相机内参为:
第二处我自己的相机内参为: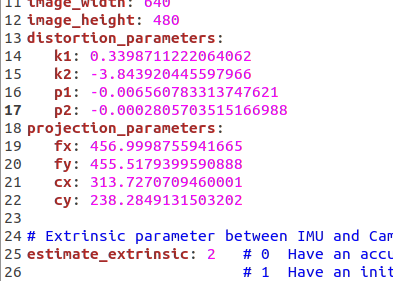
五.运行VINS-Mono
roslaunch realsense2_camera rs_camera.launch roslaunch vins_estimator realsense_color.launch roslaunch vins_estimator vins_rviz.launch
运行结果(GIF动图):
 参考博文:
参考博文:
你可能感兴趣的文章
IOS 网络学习系列
查看>>
react-native新导航组件react-navigation详解
查看>>
React Native 仿 ofo 共享单车 App
查看>>
react-native-image-picker
查看>>
官方推荐react-navigation的使用
查看>>
react-navigation跨tab路由处理
查看>>
React-Navigation官网翻译
查看>>
react阻止冒泡事件
查看>>
react-native 实现条码扫描(ios&android)
查看>>
react + redux 完整的项目
查看>>
React Native使用fetch实现图片上传
查看>>
React Native 网络请求封装:使用Promise封装fetch请求
查看>>
React Native BLE蓝牙通信
查看>>
React-Native高校图书馆APP
查看>>
react-navigation使用技巧
查看>>
使用React模仿大众点评
查看>>
营养品类商城
查看>>
微信小程序ofo-applet
查看>>
React Native未来导航者:react-navigation 使用详解
查看>>
ReactNative仿《ONE》APP
查看>>